ICCV2019 PU-GAN
参考论文
PU-GAN: a Point Cloud Upsampling Adversarial Network
Introductin
通过扫描仪等设备所获得的三维模型的点云通常是稀疏的、有噪音的、不均匀的,因此,在对这一类的点云数据进行进一步处理之前, 需要通过一些方式对其进行修改,生成密集、完整、均匀的点云集合。在这片论文中,作者提出了一种新型的点云upsampling框架,并命名为PU-GAN。
Method
Overview
给定一个无序的点击,期望生成一个更加密集的点集,其中r被称为上采样率。对于生成的点击Q,需要满足两个条件:
-
输出Q与输入P应该对一个目标物体描述了同样的集合特征,因此在集合Q中的点应该分布并且覆盖在目标物体的表面。
-
即使输入P中的点是稀疏并且不均匀的,输出Q上的点也应该均匀分布在目标物体的表面
PU-GAN的网络结构如下所示:
网络结构 Network Architecture
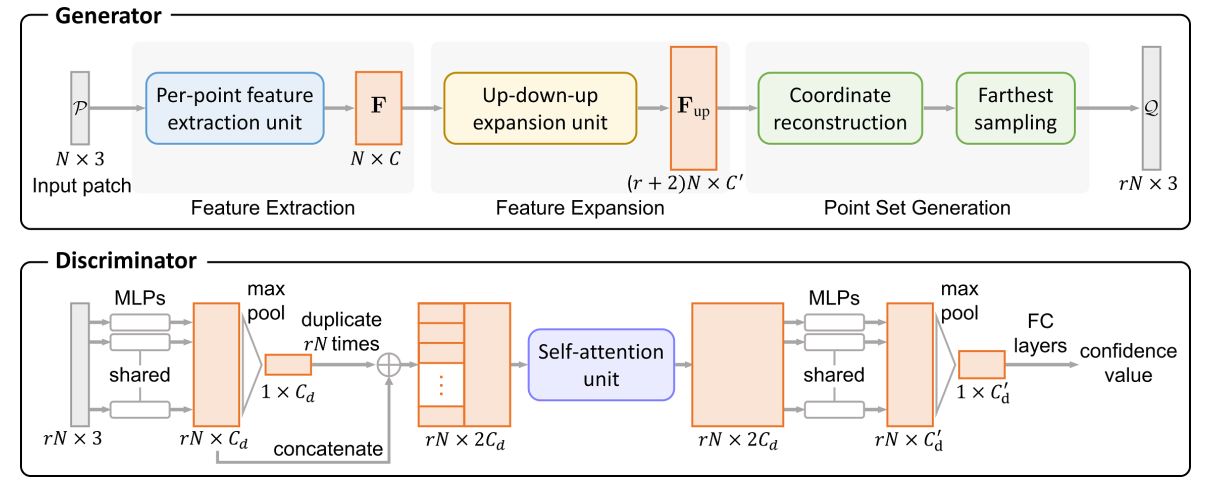
生成器 Generator
在生成器中,论文中主要通过三个部分对输入点集P进行处理:特征提取模块、特征扩展模块以及点集生成模块。
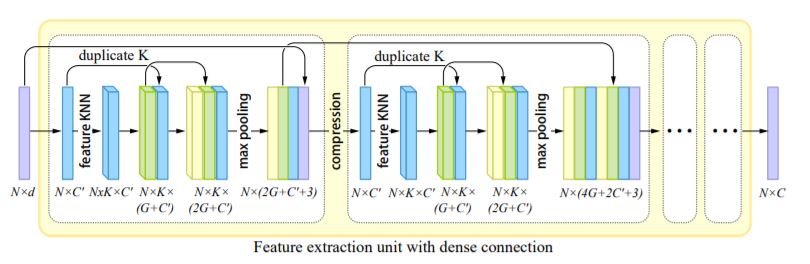
特征提取模块(The feature extraction component)用于从输入集合中提取特征信息F,其中d表示输入点属性(坐标、颜色、法向量等)的维度,在这里,n=3。对于特征提取网络,作者采用Patch-based progressive 3D point set upsampling中所提出的方法,特征提取模块的网络结构如下图所示,这一网络采用dese connection,网络中的操作被分为一系列的dese block,中间值通过dese connection在block内与block间相连接,这样保证了在每一层提取的特征能够被重复利用,以此可以在小的模型规模上同样产生好的重建效果。
特征扩展模块(The feautre expansion component)将提取的特征F扩展为,在这一模块中,论文提出了up-down-up expansion unit来提高的方差,使得生成器能够生成更多不同种类的点集分布。
点集生成模块(The point set generation component)首先通过MLP将特征回归到三维坐标的集合上,之后通过farthest sampling取样出个点作为最终生成器生成的点集,这也是之前具有个特征的原因。
判别器 Discriminator
判别器的目标是判断输入的点集是否是生成器所生成的。判别器中首先采用了论文(PCN: Point completion network)中提出的网络来进行特征提取,这一网络结构能够有效地提取全局以及局部的特征信息,并确保了一个轻量的网络结构,其结构如下所示:
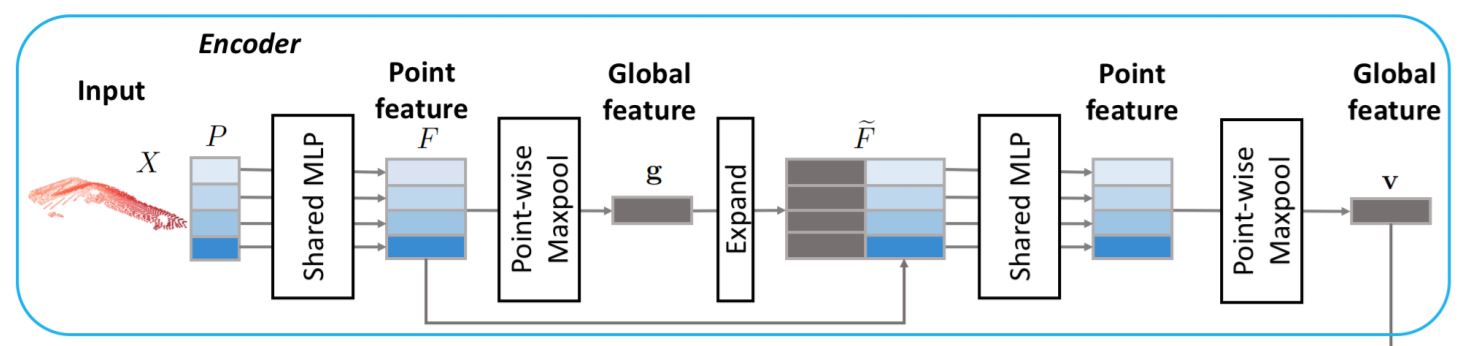
判别器中特征提取网络的输入为点集P,其中的每一行表示点集中一个点的坐标信息,之后的共享MLP包含了两层线性连接层并通过ReLU激活函数连接,用于将每个点转换为点的特征,之后得到了点集的特征矩阵,再经过最大池化层得到k维的全局特征。之后再将全局特征与每个点的局部特征相连接,组成新的特征矩阵。
论文(PCN: Point completion network)提出的网络共有两层PN层,在PU-GAN中,作者在两层之间加入了self-attention unit以提升对特征的学习能力,并在最后加入全连接层得到confidence值。
Up-down-up Expansion Unit
Up-down-up Expansion Unit结构图如下所示:
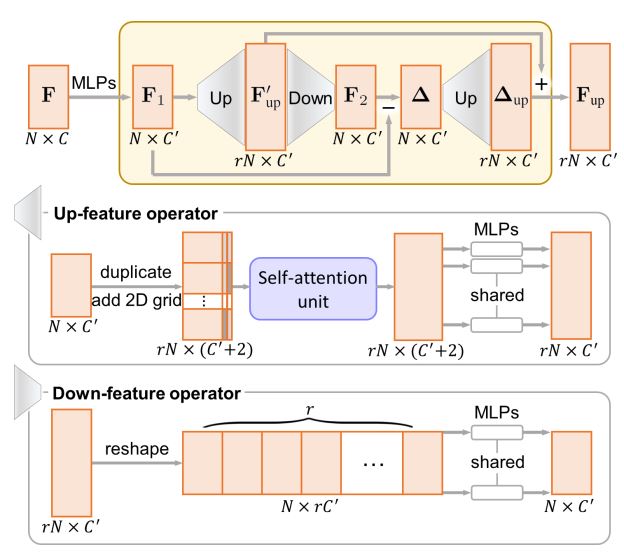
在这一部分中,网络首先将点集特征经过上采样生成,再经过下采样回到原来点集特征的大小,记作,之后将经过上下采样后的特征与原始的特征进行比较,计算出差值,之后将经过上取样生成与相加,得到最终的上取样结果。
Up-feature operator
为了能够对点的feature进行上采样,需要将复制了r次的特征间的方差尽可能大,也就是说,需要使得新采样的点与原始点之间的距离尽可能大一些。在复制了特征矩阵r次之后,利用FoldingNet的思想,对每一个复制的特征连接一个独有的二维向量。之后再经过self-attention unit与MLP之后输出上取样后的特征矩阵。
Down-feature operator
为了进行下取样,将上取样后的特征矩阵变形为。再经过MLP之后得到原始的特征。
Self-attention Unit
为了在特征中引入大范围的context的关联关系去提高特征的整体性,论文里在生成器和判别器中都加入了self-attention unit,自注意力模块的结构如下所示:
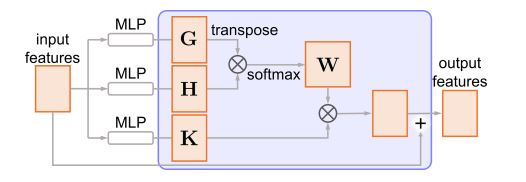
首先将特征矩阵经过三个不同的MLP转换成G、H与K,之后再通过G与H计算出注意力权重W:
之后,就可以得到权重特征,最终,计算出的权重特征矩阵与原始的特征矩阵相加,即得到最终的输出。
Loss function
Adversarial loss
其中表示由生成器生成的点集通过判别器D之后的confidence值。
Uniform loss
为使得最后生成的点云集合在目标物体的表面上分布均匀,需要设计Uniform loss来满足这一要求。论文中提到,在网络的训练中,首先通过farthest sampling在生成的中取出M个点作为种子,之后以这些种子为园心,以为半径,将圆内的点聚合到一个M个子集中。这一圆按照测地距离进行划分,在进行这些操作之前,首先需要对整个模型进行归一化,令整个模型平铺之后的区域约为,则每个子集中的点与所有点的百分比应大致为,通过这一公式计算出一个子集中应有的点数,记为,则定义下述公式:
但是,仅通过上述约束依然不够,在同一个子集中,仍然会有很多不同的点的分布,因此需要继续考虑在同一个子集中的点局部分布的情况。
在一个点的子集中,我们去找到其中每一个点距离最近的邻居,对于子集中的第k个点,计算其距离为,如果内的点满足均匀分布,则每个点到它最近点的距离应该大致为,这一公式假设所代表的子集为平面且每个点代表一个六边形,如下图所示:
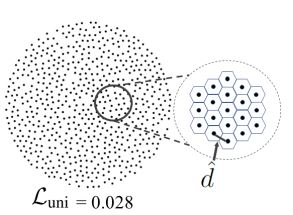
因此定义下述公式:
因此,得到最终的Uniform loss为:
Reconstruction loss
上述两种loss函数其实并没有限制点云是否覆盖在目标模型的表面上,因此需要继续引入reconstruction loss:
其中是双射映射。
Compound loss
总的来看,我们通过最小化以及来训练PU-GAN: