CVPR2018 FoldingNet
参考论文
FoldingNet: Point Cloud Auto-Encoder via Deep Grid Deformation
Introduction
三维点云集合是一种不规则,无序的数据结构,很难通过二维神经网络的方法对其进行处理,之前对于点云的处理通常是将其体素化后再进行处理。
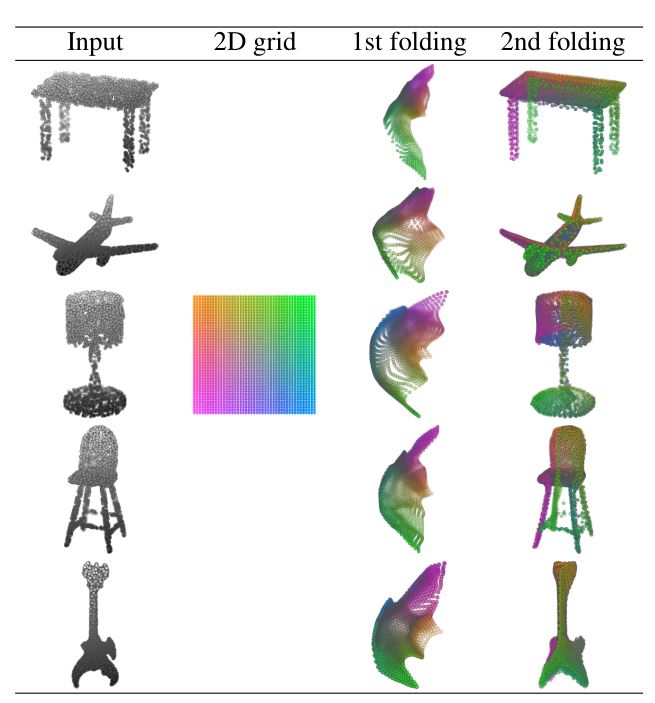
在本文中,作者将三维点云看作一个物体表面经过采样之后的结果,因此,一个三维的点云可以用二维网格点通过fold的操作(包括裁剪、折叠以及拉伸等)来获得。本文所提出的网络中decoder的部分,就模拟了折叠这一过程,从论文的实验结果就可以看到,只要经过两次折叠,就能够得到较好的生成模型,如下图所示:
总结来看,这篇文章提出了一种新的端到端的自动编码器,能够直接处理无序的三维点云集合;提出了一种新的decoder的思路,通过折叠的方式重建三维模型;通过FoldingNet生成的codeword同其他方法相比,有着更好地分类效果。
The overview of FoldingNet
FoldingNet的网络结构如下图所示:
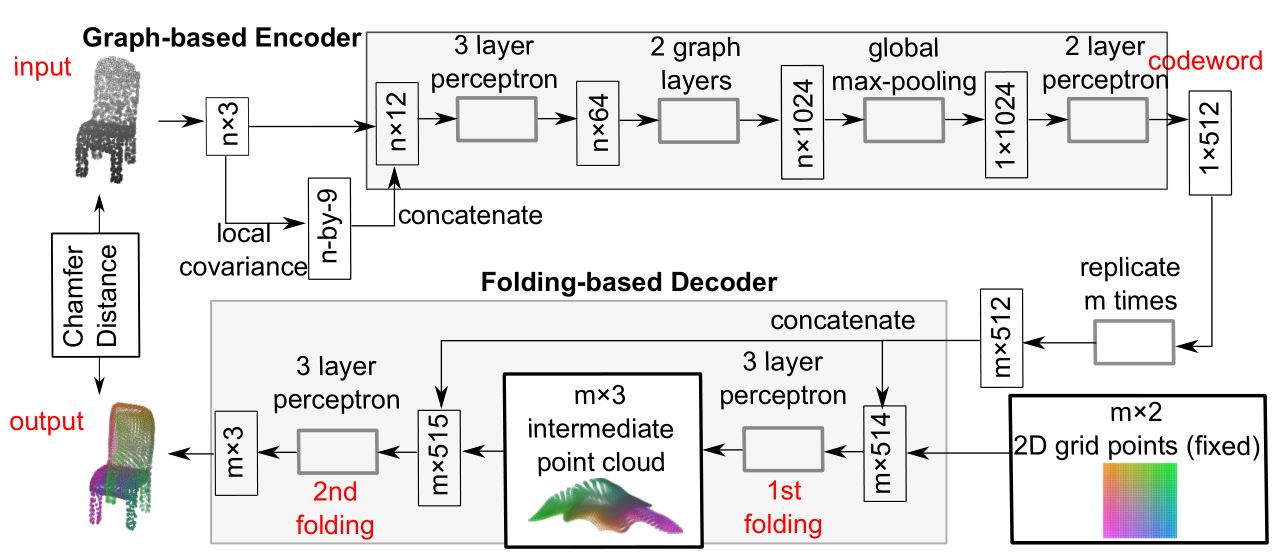
Graph-based Encoder Architecture
对于encoder,需要提取出三维模型的特征信息,首先通过graph layer以及最大池化操作,将每个point临近的特征信息聚合起来,之后再连接一个2层感知器,最终得到一个512维的codeword。对于graph layer的设计,本文基于论文Mining point cloud local structures by kernel correlation and graph pooling所提出的模型进行了改进。
Folding-based Decoder Architecture
解码器基于folding的操作进行设计,由编码器生成的512维向量复制m份,将含有m个点的二维网格点与codeword连接起来组成m*514维的矩阵作为decoder的输入,每一层folding的输出为m*3的矩阵,表示一个含有m个点的三维点云模型,之后再将这一点云模型与codeword相连接,作为下一层folding的输入。
Loss Function
FoldingNet的重建误差定义为:
其中,表示输入点集,表示重建模型的点集,loss function表示从到的距离与从到的距离必须同时小。